{kind=link}
{kind=link}
Történeti összefoglaló
Az ember már a kezdetek óta érdeklődött a helye, helyzete iránt a Földön.
A nagy ősi civilizációk igen sok csillagászati ismerettel rendelkeztek, amiket a térképészet szolgálatába állítottak.
Időszámításunk előtt 201-ben Eratoszthenész például már képes volt arra, hogy a földrajzi helyek szélességi adatai közötti különbséget közelítőleg meghatározza a delelő nap helyzetének megfigyelésével. Erre alapozva még a Föld sugarát is képes volt megmérni.
A tengeri kereskedelmet és a távoli földrészek meghódítását igen erőteljesen támogatta a kínai eredetű mágneses iránytű európai elterjedése.
A középkorban az északi féltekén a földrajzi szélességet már igen pontosan meg tudták határozni a sarkcsillag helyzetének a mérésével.
A földrajzi hosszúság meghatározásához a Nap delelési idejét mérték. Ez nagy pontosságú kronométert igényelt, amelynek az elkészítésére az angol kormány 1707-ben pályázatot írt ki.
Ezt a pályázatot John Harris nyerte meg bravúros mérnöki alkotásával.
Ezek a helymeghatározási módszerek azonban a 20. század igényeinek már kevésbé feleltek meg.
Az 1920-as években vetődött fel az ötlete egy rádiónavigációs rendszer kifejlesztésének, amelynek segítségével a hajók navigátorai meghatározhatták a helyzetüket partközelben. Ezt a rendszert, amelyet LORAN-nak hívtak (Long Range Aid to Navigation = Távoli navigációs segítség) az amerikai hadsereg a második világháború elejére már rendszeresítette. A LORAN hálózat elérhető volt a világ legtöbb helyéről, főleg Európából és Amerikából, azonban csak kétdimenziós rendszer volt, s ezáltal nem volt alkalmas repülőgépek helymeghatározására.
1960-as években az USA Haditengerészete számára elkezdték kiépíteni a TRANSIT műholdas navigációs rendszert, elsősorban a hadihajók és a katonai repülőgépek navigációja céljából. Ennek hét darab műholdja közel kör alakú pályán keringett 1100 km magasan. 1967-től polgári célokra is felhasználhatóvá tették és még az 1990-es években is több felhasználója volt a kisebb hajók és repülőgépek navigátorai között. A rendszert azonban sok kritika is érte: mivel a viszonylag kis számú műhold naponta csak szűk észlelési ablakot biztosított (15-20 perc/átvonulás) így hosszú volt a várakozási idő a következő mérésre. Továbbá egy-egy helymeghatározás pontossága 50 méter volt, így pontos helyzethez csak több mérés átlagából lehetett hozzájutni. Ezen okok miatt a rendszer gyorsan mozgó objektumok navigációjára nem volt alkalmas. Ráadásul az alacsony pályamagasságuk miatt a műholdak pályája egyáltalán nem volt stabil. Ezekhez járult még, hogy a műholdak alacsony frekvenciájú jeleit az ionoszférában lejátszódó jelenségek nagy mértékben torzították.
Az egyre növekvő igények egy új helymeghatározó rendszer kifejlesztését tették szükségessé. Követelmény volt vele szemben, hogy képes legyen rakéták és más harci járművek gyors és pontos helymeghatározására a nap 24 órájában az időjárástól függetlenül. A csúcstechnológia alkalmazása lehetővé tette egy ilyen rendszer kiépítését lényegében párhuzamosan az USA-ban és az akkori Szovjetunióban. Amerikában 1973 december 17-én mutatták be a NAVSTAR GPS (Navigation System with Timing and Ranging = navigációs műholdas idő- és távolságmeghatározás) 24 műholdból álló rendszerét. A szovjetek hasonló rendszere a GLONASS (Globalnaja Navigacionnaja Szputnyikovaja Szisztyema) nevet kapta. Ez a Szovjetunió bukása miatt soha nem érte el a teljes kiépítettséget, ellentétben a GPS-szel, amely 1994-ben eljutott idáig.
A műholdas helymeghatározás geometriai alapelve
Feladatunk, hogy határozzuk meg a térben elfoglalt helyzetünket néhány körülöttünk keringő szatellita segítségével. Először egy adott pillanatban megmérjük az álláspontunk és az első műhold távolságát. Legyen ez a távolság 20000 km. Egy mérés alapján a helyzetünkről csak azt mondhatjuk, hogy valahol azon a gömbön van, amit a műholdra mint középpontra 20000 km-es sugárral szerkesztettünk.
Ugyanebben az időpontban mérjük meg a távolságunkat egy másik műholdtól is. Legyen ez a távolság 21800 km. Világos tehát, hogy mi rajta vagyunk azon a gömbön is, amelyet a második műhold, mint középpont körül 21800 km-es sugárral szerkesztettünk. Vagyis álláspontunk rajta van a két gömb metszésvonalaként létrejött körön.
Mérjük meg ugyanebben a pillanatban a távolságunkat egy harmadik műholdtól is, és ez legyen mondjuk 23600 km. Ez a harmadik gömb két pontban fogja metszeni az első két gömb metszésvonalát, mi tehát a két pont valamelyikében állunk.
|
|
|
|
| Egy távolság mértani helye a gömb. | Két gömb metszésvonala kör. | Három gömb két pontban metszi egymást (ábra: Dr.Sárközy Ferenc) |
Sikerült tehát két pontra szűkíteni a lehetséges helyzeteink számát. Természetesen nekünk ezek közül csak az egyik adhatja meg a valós pozíciónkat, a másikat ki kell ejtenünk. Ezt kétféleképpen tehetjük meg: ha tudjuk, hogy a Föld felszínén állunk, akkor az a keresett pontunk, amelyik közelebb van a Földhöz. Vagyis itt a Földet, mint egy negyedik gömbfelületet vesszük számításba, amelynek a pozícióját ismerjük. Ha azonban nem tudjuk biztosan meghatározni, hogy melyik pont írhatja le a pontos helyzetünket, akkor szükségünk lesz egy negyedik műhold távolságának a meghatározására is, és így jutunk hozzá a negyedik gömbhöz.
A GPS működése és felépítése
Névlegesen a rendszer 24 műholdból áll (21 aktív és 3 tartalék) amelyek 20200 km magasságban a nap minden 12 órában megkerülik a Földet.
A műholdak a 6 pályasíkon egymáshoz képest 60 fokkal el vannak forgatva, az egyenlítőhöz viszonyított pályaelhajlásuk 55 fok.
Az egyes műholdak mindig azonos pályán keringenek oly módon, hogy egy pontot minden nap négy perccel korábban érnek el.
A műholdak száma, helyzete és a pályasíkok azt a célt szolgálják, hogy a földfelszín bármely pontján adott időpillanatban a látóhatár síkja fölött 15°-kal legalább négy szatellit látható legyen.
Általában azonban ennél több műhold is látható egy időben, mivel az elöregedőket folyamatosan cserélik le újabbakra.
Egy-egy műhold súlya két tonnát nyom, napelemeinek mérete 18 méter, teljesítményfelvétele 2 kW, tervezett élettartama pedig 15 év.

|

|
| A GPS műholdat ábrázoló rajz. | Egy GPS műhold a szerelőüzemben. |
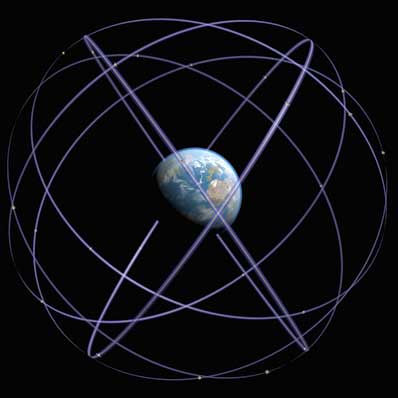
|
|
| A GPS műholdak pályái a Föld körül. |
A műholdak szabályos időközönként jeleket bocsátanak ki, amelyben küldött adatok tartalmazzák a műhold aktuális helyzetét, és a rajta mérhető pontos időt. Minden műholdon található egy cézium, vagy rubidium atomóra, amellyel nagy pontossággal mérhető az idő, ami az egész rendszer működésének az alapja. A rendszer minden műholdja szinkronizáltan működik, azaz az óráik pontosan össze vannak hangolva és jeleiket is egy időben küldik a megfigyelő felé.
A rendszer másik fontos feltétele a műholdak helyzetének pontos ismerete. A nagy keringési magasság miatt a földi atmoszféra már nem befolyásolja a szatellitek pályáit, így az nagy pontossággal előre meghatározható. De a precizitás növelése érdekében az USA védelmi minisztériuma (DoD = Departement of Defence) létrehozta a földi figyelő és követő hálózatát, amely feladata a GPS műholdak követése, napi vizsgálata, aktuális pozícióik és sebességük mérése, az esetleges pálya- és egyéb korrekciók végrehajtása és a pontosított adatoknak a műholdra történő eljuttatása.
|
|
| A monitorállomások elhelyezkedése a Földön. | A magyarországi referenciapontok. A fő központ Pencen található. |
A GPS műholdakat az amerikai katonaság fejlesztette ki és állíttatta páylára. Polgári felhasználásuk csak 1978-ban indult meg. Ezért katonai indokok miatt a műholdak kétféle kódot sugároznak: a civil szféra által elérhető és körülbelül 15 méteres pontosságot biztosító C/A (coarse/acquisition - durva/elérés) kódot, valamint a katonai vevők által értelmezhető, úgynevezett P kódot (P a precision - szabatos rövidítése), amelynek a pontossága 1 cm. Ezen felül a polgári felhasználású kódot még mesterségesen tovább rontották, tartva attól, hogy a GPS jeleit ellenséges szervezetek is felhasználják. A védekezésre az ún. Selective Availability (SA) nevű technikát alkalmazták, ami használatával a GPS civil vevők pontosságát körülbelül 150-300 méterre csökkentették. Clinton elnök döntésére 2000. május 2-án hajnalban megszüntették a pontosság mesterséges rontását. Ezáltal a valós idejű helymeghatározás pontossága tízszeresére nőtt, vagyis a vízszintes hibája mintegy tíz méterre csökkent. A gyakorlatban azonban sok esetben néhány méteres pontosság is elérhető.
|
| A penci permanens állomás méréseiből számított abszolút pozíciók hibája május 2-án hajnalban. (az ábra Takács Bencétől származik) |
A GPS rendszer harmadik (az első kettő a műholdak és a földi állomások voltak) egysége a felhasználók vevőkészülékei. Ezek szintén tartalmaznak egy nagy pontosságú kvarcórát. Amikor a műhold kisugározza a pillanatnyi helyzetét és a fedélzeti időt, a rádiójelek némi késéssel érkeznek a vevőkészülékbe (20000 kilométeres magasságban ez a késleltetés 0,06 másodperces) A késésből így a készülék ki tudja számítani a műhold tőle mért távolságát. Négy műhold adataiból pedig megkaphatjuk a pontos helyzetünket.

|

|
|
| Néhány GPS vevőkészülék. |
A Galileo rendszer
Európa sem akar lemaradni az amerikaiak mögött. 2002 márciusában az EU elfogadta egy sok milliárd dolláros navigációs rendszer támogatását, ami az autósoktól a hajósokig bezáróan bárkinek segítséget nyújt a tájékozódásban a világ bármely pontján. A rendszert Galileo-nak hívják, nem titkolt célja az amerikai GPS uralmát megtörni, bár a két rendszer kompatibilis lesz egymással. A Galileo a GPS rendszerrel ellentétben minden fegyveres testülettől független lesz. Ez, és még az a tény, hogy Kína is segítséget nyújt a rendszer kiépítésében, szálka lett az Egyesült Államok szemében. Ők ugyanis a GPS polgári hozzáférhetőségét egy vélt, vagy valós konfliktus esetén csökkenthetik, vagy akár meg is szüntethetik, míg a Galileo tőlük függetlenül tovább üzemelne. Így azt az ellenfél is felhasználhatná navigációs célokra. Ez a monopólium volt az egyik fő oka a Galileo projekt megszületésének: a Pentagon ugyanis nem vállalt semmiféle garanciát a szolgáltatás biztosítására. Egy esetleges leállítása a GPS rendszernek pedig katasztrófákhoz vezethet, itt gondolhatunk akár egy tankhajó zátonyra futására is.

|
|
| A leendő Galileo műholdak. | A Galileo műholdak pályái. |
A Galileo rendszer 27 működő és 3 tartalék műholdból fog állni, amelyek 23 600 kilométeres magasságban keringenek majd a Föld körül. A rendszer 2008-ban kezdi meg a működését. Mivel a műholdak a legmodernebb technikával fognak készülni, a pontosságuk egy méteren belül lesz, ami tízszeres javulás a GPS-hez képest.
 vissza a főoldalra |
 vissza a felhasználásokhoz |
Források:
Pap László: A technika új csodája: a globális helymeghatározás
A GPS rendszer
GPS és navigáció
GPS navigáció
GPS háborúban és békében
Műholdas helymeghatározás
A háromdimenziós pontmeghatározás: GNSS technika, pontsűrítés műholdas helymeghatározás alapján
Miért nem pontos a GPS-el mért pozicióm?
GPS mérések pontossága a SA kikapcsolása után
USA-Európa vita a Galileo GPS-rendszerről
Dögölj meg Európa - amerikai módra
Európa Kína segítségével fejleszti a GPS riválisát
Galileo kontra GPS?
Utolsó módosítás: 2005.05.10.