
Az orbiter 3 tengely mentén irányítható minden küldetési fázisban a kilövési eszköztől való elkülönülés után. Az elsődleges helyzetmeghatározás a csillagkamerán és a nehézség mérő egységen (IMU) keresztül történik, ellenőrizve analóg nap érzékelőkkel. A mozgásszabályozók irányítják a viselkedésellenőrzést minden fázisban az RCS meghajtókon keresztül, mivel az IMU nem mindig működik. Az IMU-t kikapcsolják a hajózó és a térképező fázis jelentősebb manővereinél, csak a csillagérzékelést alkalmazzák. Ezért a RCS meghajtók gondoskodnak az irányításról a pályakorrekcióknál (TCM), az orbitális pályáraálláskor (MOI), légköri fékezésnél és az orbitális pályakorrekcióknál is.
Mindig a négy 22.4 N-os meghajtót használják a TCM-eknél és a magassági manőverezésre. A négy 0.9 N-os meghajtót csak fordulásra tervezték.
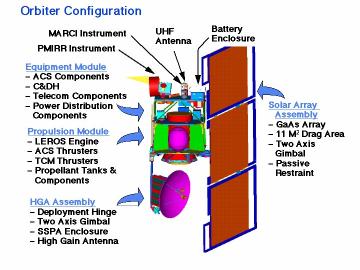
Az orbiter C&DH-ja egy RAD6000 processzort használ. Az X-sávú kapcsolat a Földdel a Cassini Deep Space Transzponderein keresztül történik. Egy 15 W RF szilárd test teljesítmény érősítő (SSPA), egy 1.3 m sugárzó/vevő nagyteljesítményű antenna (HGA), egy csak-sugárzó közepes teljesítményű antenna (MGA), egy csak-vevő alacsony teljesítményű antenna található a műszerek között. A 10 Wattos RF UHF rendszer támogatja a kétoldalú kommunikációt a landerrel.
A 3 paneles egyszárnyú napelemet (SA) a GaAs/Ge napcellákhoz és a légköri fékezésnél használják. Az telepek NiH2 CPV akkumulátorok, amíg a használt elektronika SSTI központú.
A hőmérséklet ellenőrzés passzívrendszerű, hőmérők pl.: az akkumulátorok, az SSPA-k és a MLI kombinációk hőmérsékletének figyelésére, festékek ill. radiátorok az egyes részeknél. Együtt használják a termosztatikus és a számítógépes hőkeringtetést.
Az orbiter felszerelési egysége (EM) kompozit vázszerkezetű titániumból, alumínium sejtszerkezetű panelekből áll. A napelemek és a HGA két irányban mozgathatóak.
A meghajtás kettős rendszerű, tartalmazva egy bipropilén központi hajtóművet a Mars körüli orbitális pályáraálláshoz (MOI) és a TCM (hydralize) meghajtókat minden más manőverhez.